Datasets¶
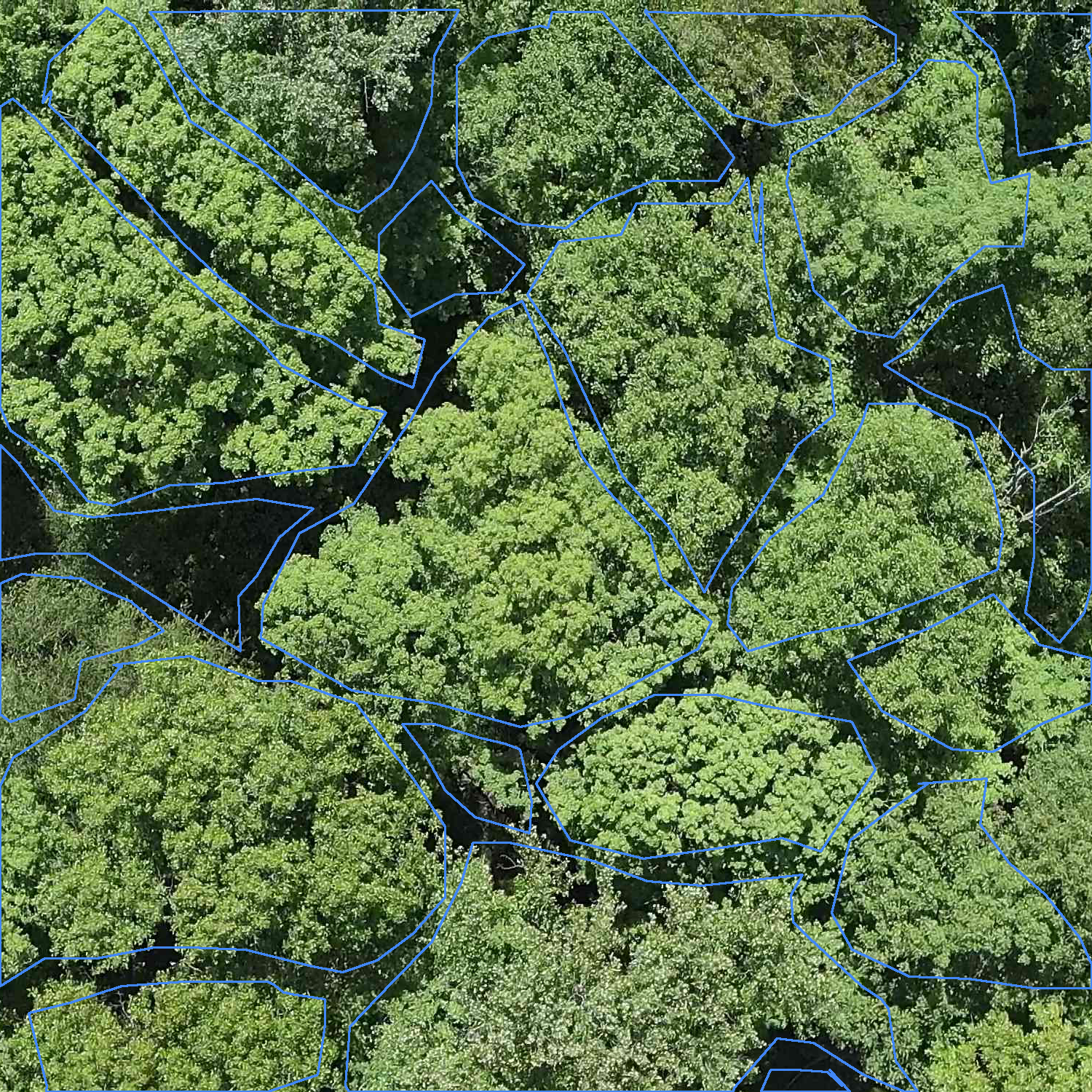
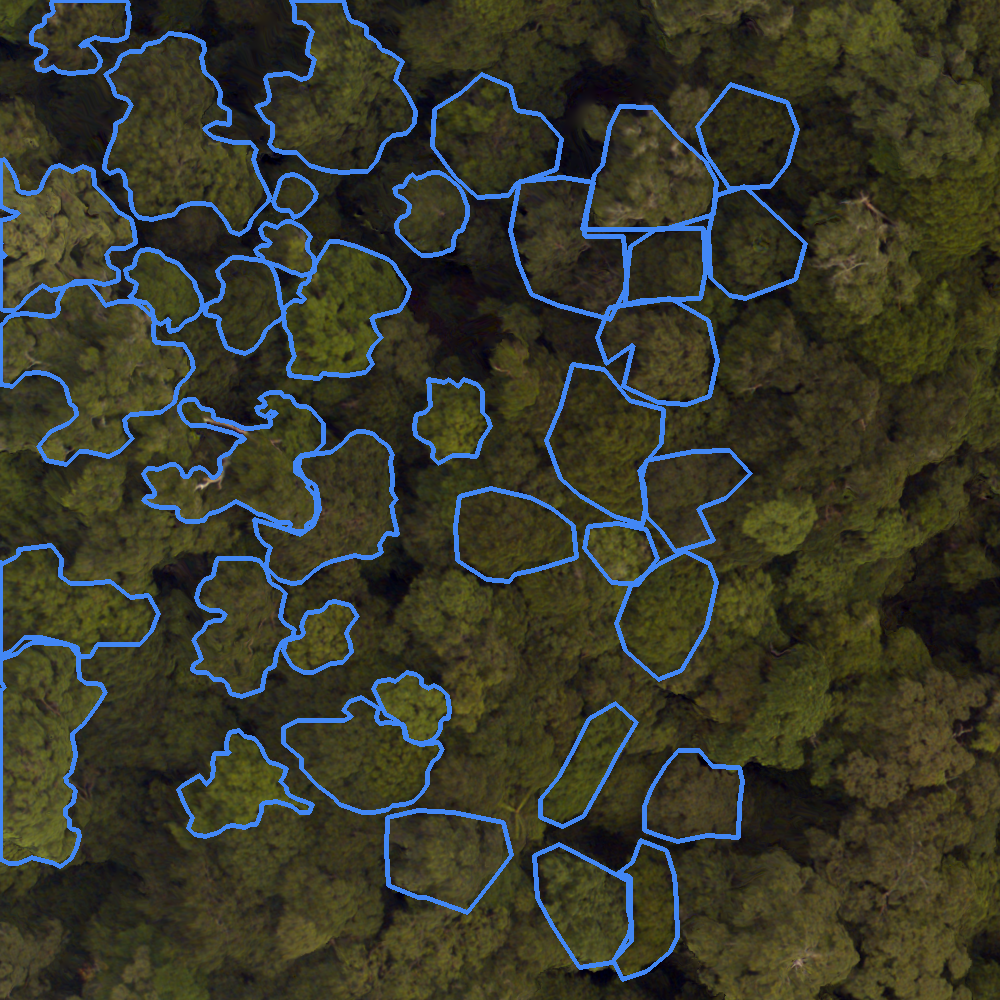
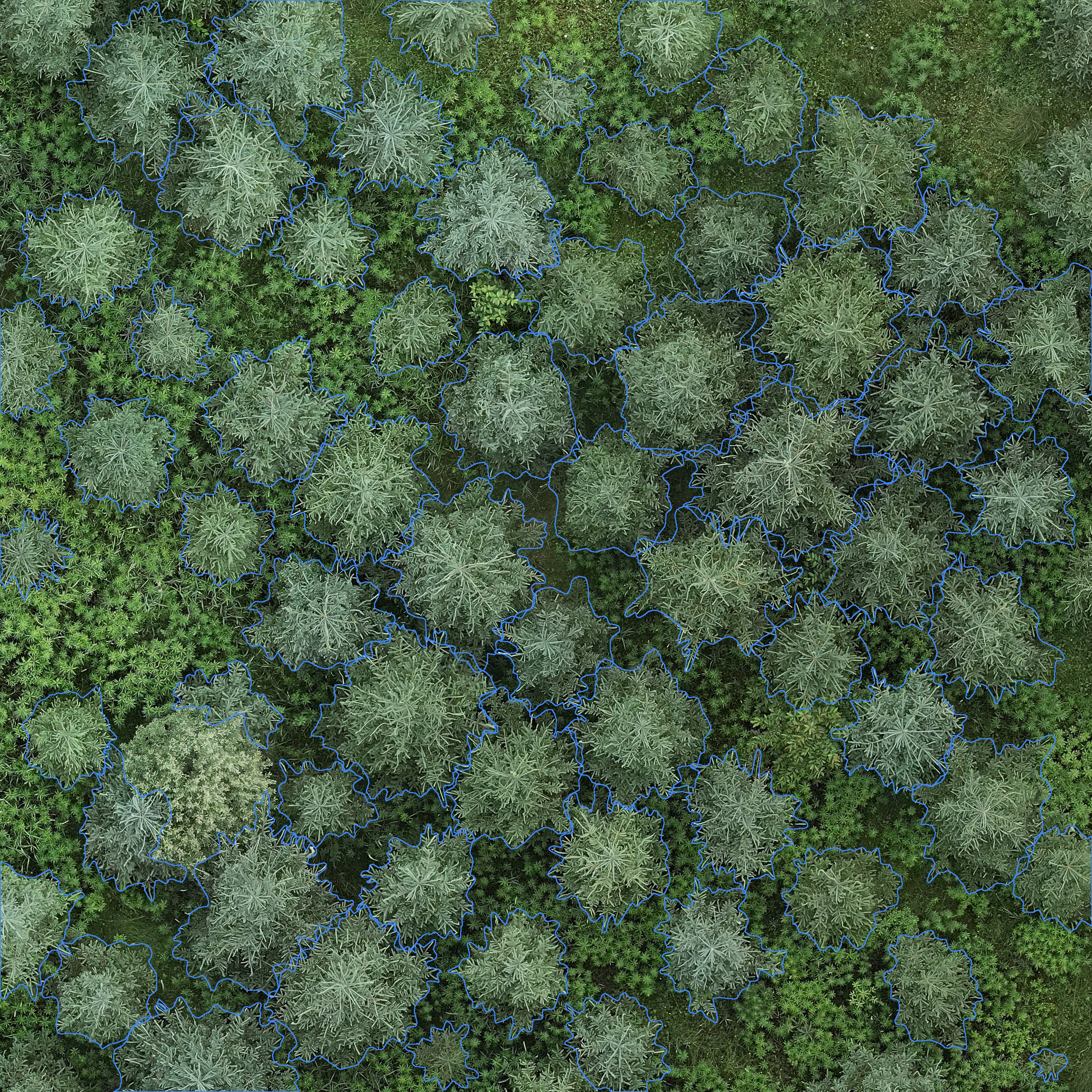
There are three datasets within the MillionTrees package: TreeBoxes, TreePoints, and TreePolygons. These datasets contain many source datasets from dozens of papers and research efforts. Below, each source is briefly described. The images for each dataset are generated directly from the dataloaders to allow rapid verification of the annotation status and are regenerated automatically when a new dataset is released or updated. Sample images within a dataset are randomly selected to ensure transparency. This does mean that some images are sparsely annotated compared to the rest of the images in a source.
Note: The datasets below are processed and will be part of the final release. The current release is pre-release and not final. Only publicly available datasets are included at this time.
Dataset Filtering and Management¶
MillionTrees datasets can contain millions of annotations. Use filtering capabilities to manage dataset size and preview data before downloading.
Source Filtering¶
List and filter available sources:
from milliontrees.datasets.TreePoints import TreePointsDataset
dataset = TreePointsDataset()
sources = dataset.sources
print("Available sources:", sources)
# Available sources: ['Kattenborn_NewZealand', 'NeonTreeEvaluation', 'OFO_unsupervised', 'NEON_unsupervised'...]
Include only specific sources:
dataset = TreePointsDataset(
include_sources=['Amirkolaee et al. 2023']
)
Exclude specific sources (exact names or glob patterns supported):
# Exclude a single source by name
dataset = TreePointsDataset(exclude_sources=['NEON_unsupervised'])
# Exclude by pattern (wildcards)
dataset = TreePointsDataset(exclude_sources=['*_unsupervised'])
Release sizes (mini, small, full)¶
Each geometry dataset is published in three sizes:
mini (
mini=True): up to 3 images per source;randomsplit only — fastest smoke tests.small (
small=True): up to 50 images per source; all split schemes (random,zeroshot,crossgeometry).full (default): complete packaged release.
dataset = TreePointsDataset(mini=True)
dataset = TreeBoxesDataset(small=True, split_scheme="zeroshot")
Do not pass mini=True and small=True together.
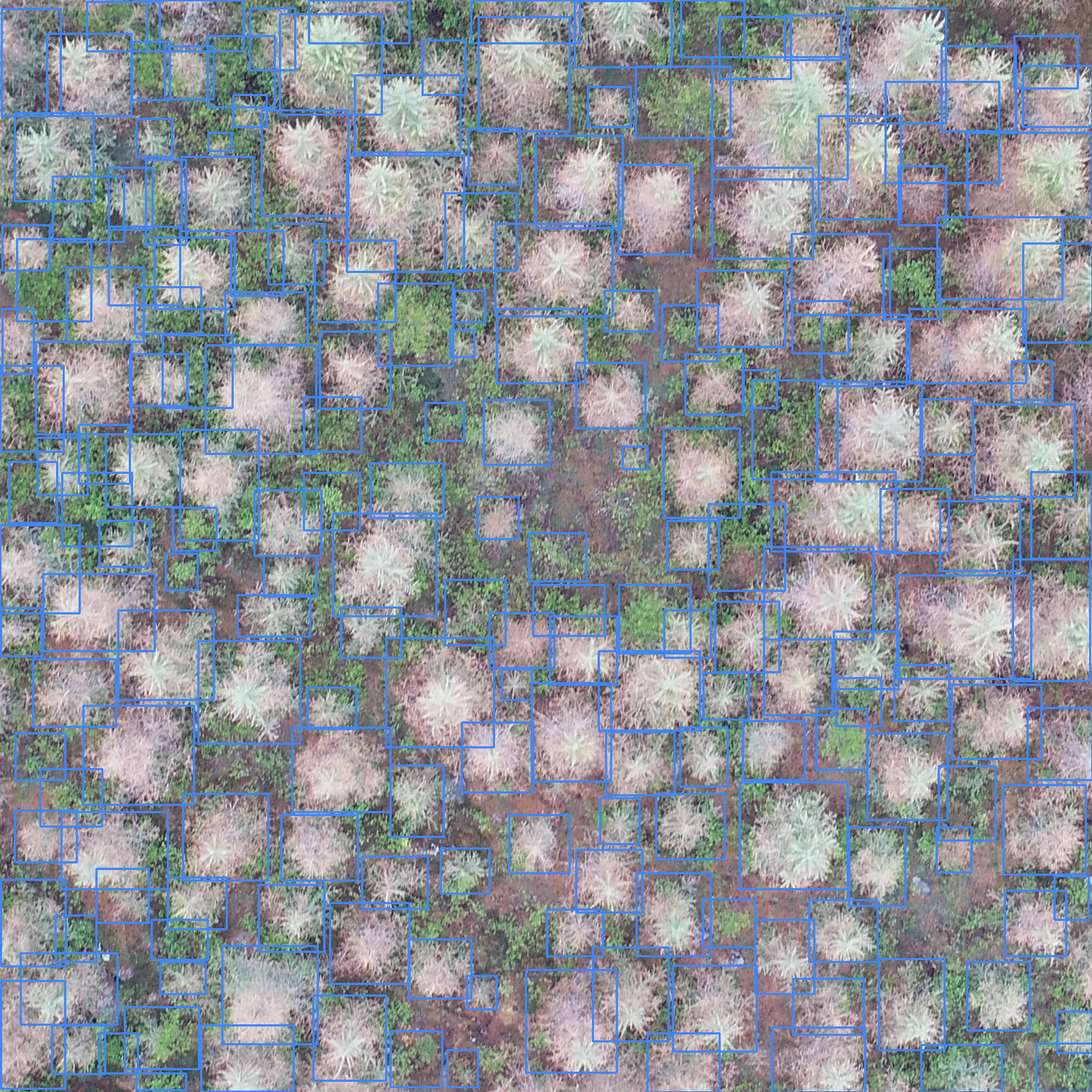
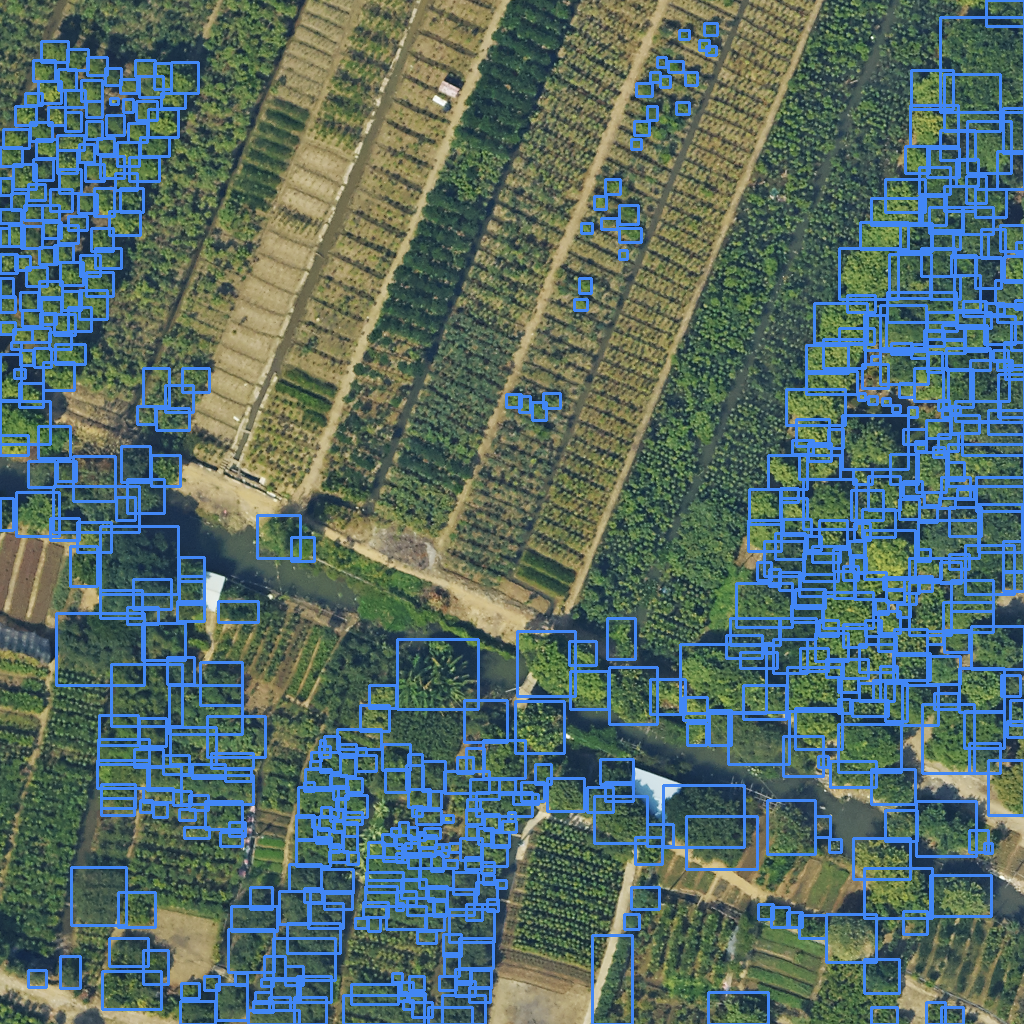
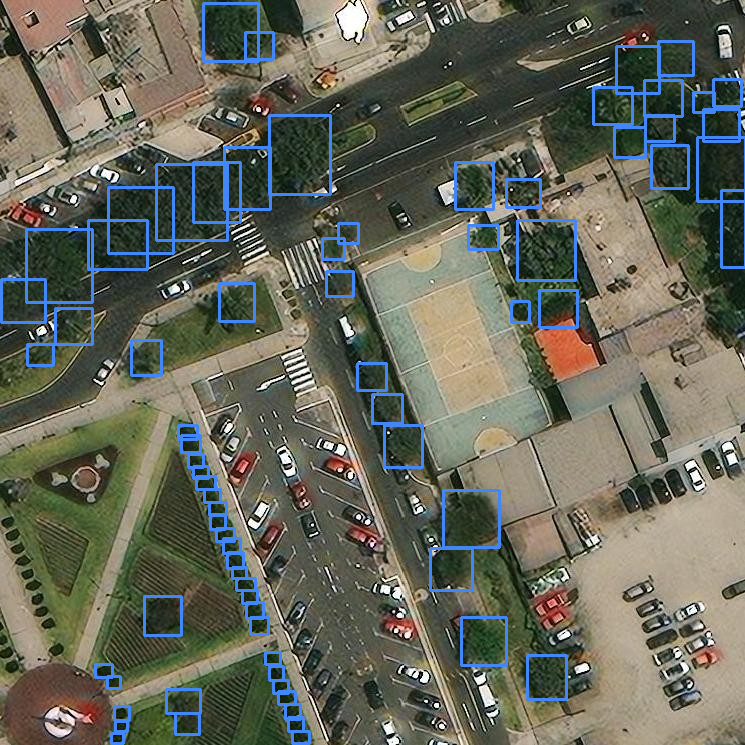
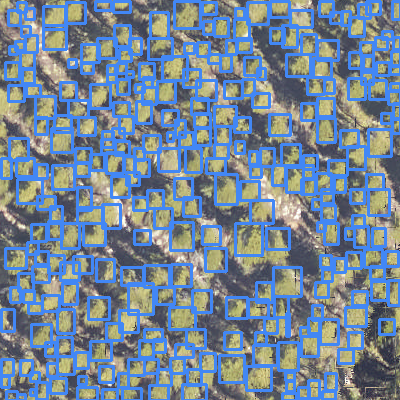
Boxes¶
Dumortier 2025¶
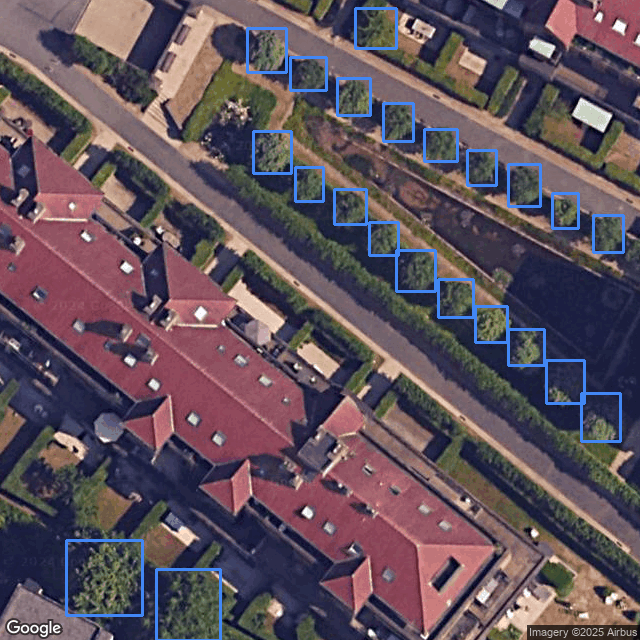
Citation: Dumortier, J. (2025). Annotated tree crown bounding boxes in urban/rural environment [Data set]. Zenodo. https://doi.org/10.5281/zenodo.15155081
Kaggle Palm Counting¶
Source Name: “Kaggle_Palm_Counting”¶
https://www.kaggle.com/datasets/praneethsaikolla/palm-tree-detection-dataset
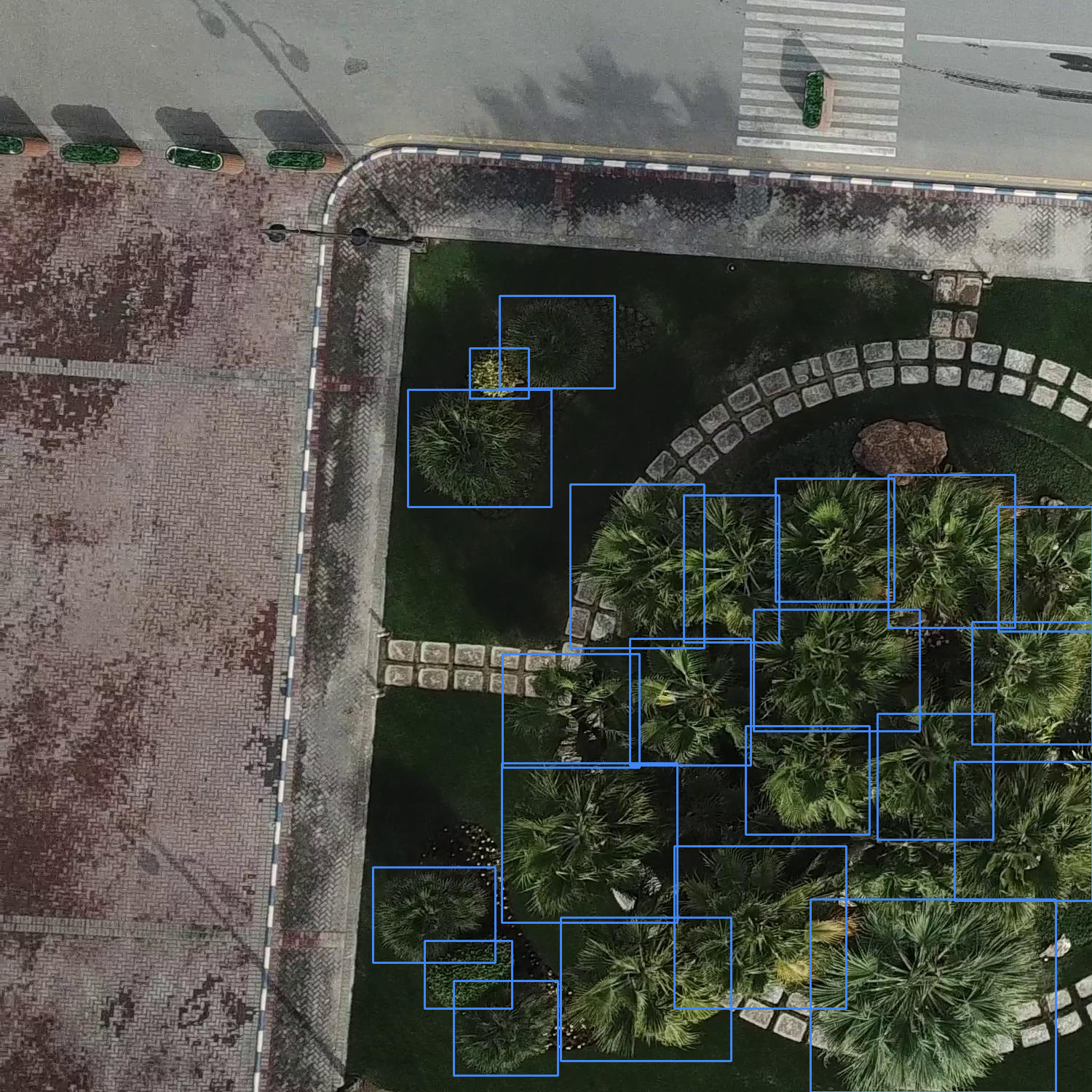
Kwon et al. 2023¶
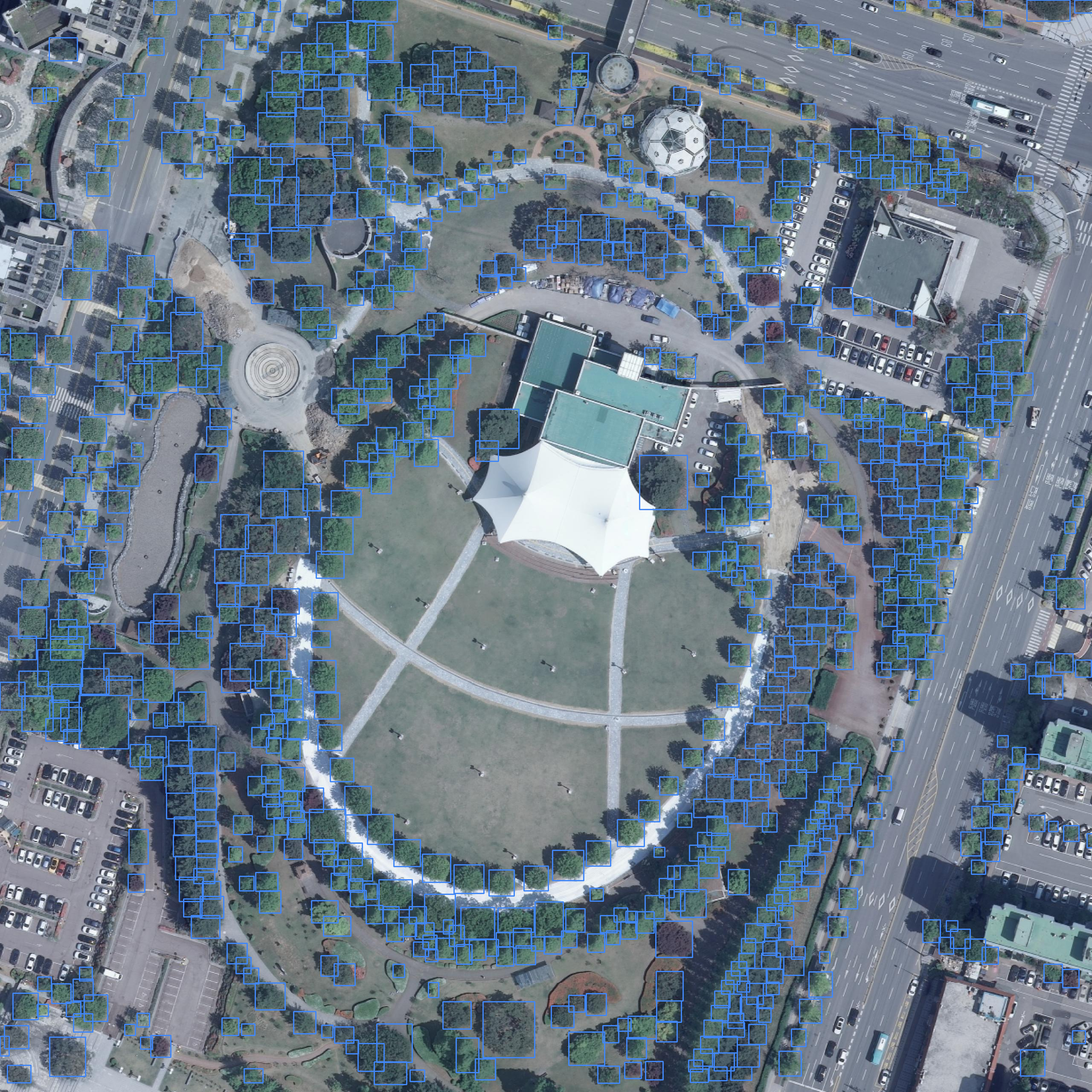
Citation: Ryoungseob Kwon, Youngryel Ryu, Tackang Yang, Zilong Zhong, Jungho Im,
Merging multiple sensing platforms and deep learning empowers individual tree mapping and species detection at the city scale,
ISPRS Journal of Photogrammetry and Remote Sensing, Volume 206, 2023
Location: Suwon, South Korea
Radogoshi et al. 2021¶
Link: https://lila.science/datasets/forest-damages-larch-casebearer/
Dataset citation: Swedish Forest Agency (2021): Forest Damages – Larch Casebearer 1.0. National Forest Data Lab. Dataset.
Location: Sweden
Sun et al. 2022¶
Link: https://www.sciencedirect.com/science/article/pii/S030324342100369X
Santos et al. 2019¶

Link: Dataset Ninja
Citation
@Article{s19163595, AUTHOR = {Santos, Anderson Aparecido dos and Marcato Junior, José and Araújo, Márcio Santos and Di Martini, David Robledo and Tetila, Everton Castelão and Siqueira, Henrique Lopes and Aoki, Camila and Eltner, Anette and Matsubara, Edson Takashi and Pistori, Hemerson and Feitosa, Raul Queiroz and Liesenberg, Veraldo and Gonçalves, Wesley Nunes}, TITLE = {Assessment of CNN-Based Methods for Individual Tree Detection on Images Captured by RGB Cameras Attached to UAVs}, JOURNAL = {Sensors}, VOLUME = {19}, YEAR = {2019}, NUMBER = {16}, ARTICLE-NUMBER = {3595}, URL = {https://www.mdpi.com/1424-8220/19/16/3595}, DOI = {10.3390/s19163595} }
Location: Barro Colorado Island, Panama
Velasquez-Camacho et al. 2023¶
Link: https://zenodo.org/records/10246449
Location: Spain
Weinstein et al. 2021¶
Link: https://journals.plos.org/ploscompbiol/article?id=10.1371/journal.pcbi.1009180
Location: NEON sites within the United States
An extension of this published resource was made by the Weecology Lab at the University of Florida

World Resources Institute¶
NAIP Imagery from across the United States
SelvaBox (CanopyRS)¶
Citation: SelvaBox: A high-resolution dataset for tropical tree crown detection in dense canopies
Link: https://huggingface.co/datasets/CanopyRS/SelvaBox
Location: Brazil, Ecuador, and Panama
Description: High-resolution dataset (4.5 cm GSD) with over 83,000 human bounding box annotations for tropical tree crowns in dense canopies. The dataset comprises 14 rasters from three different countries with varying spatial extents.
Veitch-Michaelis et al. 2024.¶
Link: HuggingFace Dataset
https://zenodo.org/records/11617167
Location: Global
Citation: Veitch-Michaelis, J., Cottam, A., Schweizer, D., Broadbent, E., Dao, D., Zhang, C., Almeyda Zambrano, A., & Max, S. (2024). OAM-TCD: A globally diverse dataset of high-resolution tree cover maps (1.0.0) [Data set]. Zenodo.
For more information about the dataset collation, see: Veitch-Michaelis, J. et al. “OAM-TCD: A globally diverse dataset of high-resolution tree cover maps.” Advances in neural information processing systems 37 (2024): 49749-49767.
Zamboni et al. 2021¶
Link: https://github.com/pedrozamboni/individual_urban_tree_crown_detection
Location: Mato Grosso do Sul, Brazil
Puliti and Astrup 2022¶
Source Name: “Puliti and Astrup 2022”¶
Link: https://zenodo.org/records/14711562
Location: Norway
NIBIO UAV tree damage dataset. YOLO-format bounding boxes for individual trees over Norwegian forest sites; all classes are combined as Tree for the MillionTrees benchmark.
Reiersen et al. 2022¶
Source Name: “Reiersen et al. 2022”¶
Location: Ecuador
ReForestTree dataset. Bounding boxes were generated by running DeepForest and then human-cleaned, so this source is used for training only and not for evaluation.
Šrollerů et al. 2025¶
Source Name: “Šrollerů et al. 2025”¶
Link: https://zenodo.org/records/15591546
Location: Krkonoše Mountains (Bílé Labe Valley), Czechia
UAV, aerial, and terrestrial 3D point clouds from a treeline ecotone with tree-level reference ground-based measurements across three plots (low/mid/high upper-forest limit). LiDAR-derived crown bounding boxes are projected into the matching orthoimagery for MillionTrees.
Allen et al. 2025¶
Source Name: “Allen et al. 2025”¶

Citation: Allen, M.J., Owen, H.J.F., Grieve, S.W.D., & Lines, E.R. Manual Labelling Artificially Inflates Deep Learning-Based Segmentation Performance on RGB Images of Closed Canopy: Validation Using TLS. Remote Sensing of Environment (in press). https://arxiv.org/pdf/2503.14273
Location: Joensuu, Finland (boreal) and Alto Tajo, Spain (Mediterranean)
Axis-aligned bounding boxes derived from TLS crown footprints projected into drone orthomosaics. All rows are assigned to the validation split — held out for independent post-hoc evaluation, not hyperparameter tuning.
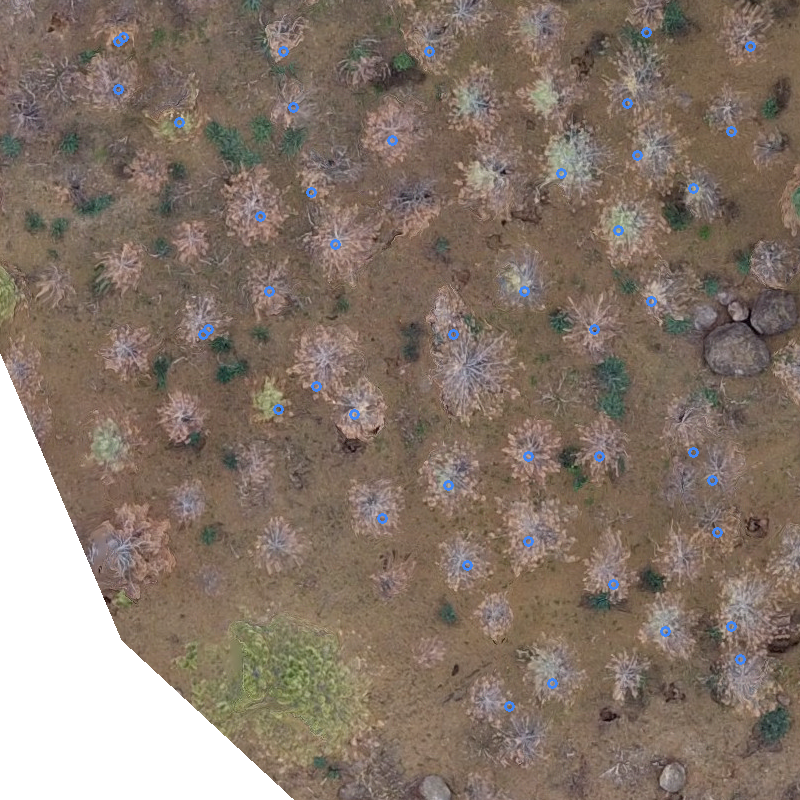
Points¶
Amirkolaee et al. 2023¶

Citation: Amirkolaee, Hamed Amini, Miaojing Shi, and Mark Mulligan. “TreeFormer: A semi-supervised transformer-based framework for tree counting from a single high-resolution image.” IEEE Transactions on Geoscience and Remote Sensing 61 (2023): 1–15.
Link: https://github.com/HAAClassic/TreeFormer
Location: London, England
GSD: 0.2m
Dubrovin et al. 2024¶
Link: Kaggle Dataset
UAV orthomosaics with accompanying field-survey tree locations. We include the field survey points as per-image point annotations for individual trees.
Location: Perm Krai, Russia
Citation: Dubrovin, Ivan, Clement Fortin, and Alexander Kedrov. “An open dataset for individual tree detection in UAV LiDAR point clouds and RGB orthophotos in dense mixed forests.” Scientific Reports 14.1 (2024): 21938.
Link (article): https://www.nature.com/articles/s41598-024-72669-5
DOI: https://doi.org/10.1038/s41598-024-72669-5
Ventura et al. 2022¶
Citation: J. Ventura, C. Pawlak, M. Honsberger, C. Gonsalves, J. Rice, N.L.R. Love, S. Han, V. Nguyen, K. Sugano, J. Doremus, G.A. Fricker, J. Yost, and M. Ritter.
Individual Tree Detection in Large-Scale Urban Environments using High-Resolution Multispectral Imagery.
International Journal of Applied Earth Observation and Geoinformation, 130, 103848 (2024)
Link: https://github.com/jonathanventura/urban-tree-detection-data
Location: Southern California, United States
GSD: 0.6m
National Ecological Observatory Network¶
Location: Multiple sites across the United States, see NEON Field Sites
Link: https://data.neonscience.org/data-products/DP1.10098.001
GSD: 0.1m
Auto-arborist¶
The auto-arborist dataset is a compilation of street-level surveys performed by local cities. Street trees were labeled with points. Annotations are limited to street trees, and do not include non-street trees. MillionTrees datasets are associated with state orthophoto programs that vary in ground resolution, from 20cm to 60cm.
https://google.github.io/auto-arborist/
Citation: Sara Beery, Guanhang Wu, Trevor Edwards, Filip Pavetic, Bo Majewski, Shreyasee Mukherjee, Stanley Chan, John Morgan, Vivek Rathod, Jonathan Huang; Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2022, pp. 21294-21307
GSD: 0.2m - 0.6m
Chen and Shang 2022¶
Source Name: “Chen & Shang (2022)”¶
Location: Yosemite National Park, California, USA
Density-map annotations from the Yosemite tree counting dataset, converted to per-tree points via morphological centroid extraction.
OSBS megaplot 2025¶
Source Name: “OSBS megaplot 2025”¶

Location: Ordway-Swisher Biological Station (NEON OSBS site), Florida, USA
Field-mapped visible-tree stems from the 2025 OSBS megaplot survey, paired with the OSBS 2025 RGB mosaic and split into uniform image tiles.
Young et al. 2025¶
Source Name: “OFO field 2025”¶
Link: Open Forest Observatory
Field-validated stem maps from the Open Forest Observatory ground reference catalog. David Young
(UC Davis) shared a concatenated set of 330 plot-drone pairs in which each tree has been manually
mapped on the ground and the plot has been algorithmically registered to a specific drone mission’s
photogrammetry products. The field trees are duplicated per overlapping mission with a
mission_id attribute denoting which orthomosaic each row should be paired with, and a
withhold_from_training flag that routes those trees to the test split.
The dataset is built by data_prep/process_ofo_field.py, which downloads the matching
missions_03 orthomosaic for each mission_id from
https://js2.jetstream-cloud.org:8001/swift/v1/ofo-public/drone/missions_03/{mission_id}/photogrammetry_03/full/{mission_id}_ortho-dsm-ptcloud.tif,
tiles it into uniform patches, and projects field-tree points into image coordinates. Trees that
are not flagged predicted_overstory (overhead visible) are dropped by default since field stems
under the canopy cannot be observed from nadir drone imagery.
Location Forests across California (Sierra Nevada and Lake Tahoe basin), USA
Allen et al. 2025¶
Source Name: “Allen et al. 2025”¶
Citation: Allen, M.J., Owen, H.J.F., Grieve, S.W.D., & Lines, E.R. Manual Labelling Artificially Inflates Deep Learning-Based Segmentation Performance on RGB Images of Closed Canopy: Validation Using TLS. Remote Sensing of Environment (in press). https://arxiv.org/pdf/2503.14273
Location: Joensuu, Finland (boreal) and Alto Tajo, Spain (Mediterranean)
Tree-top points at polygon centroids from TLS-derived crown footprints. All rows use the validation split.
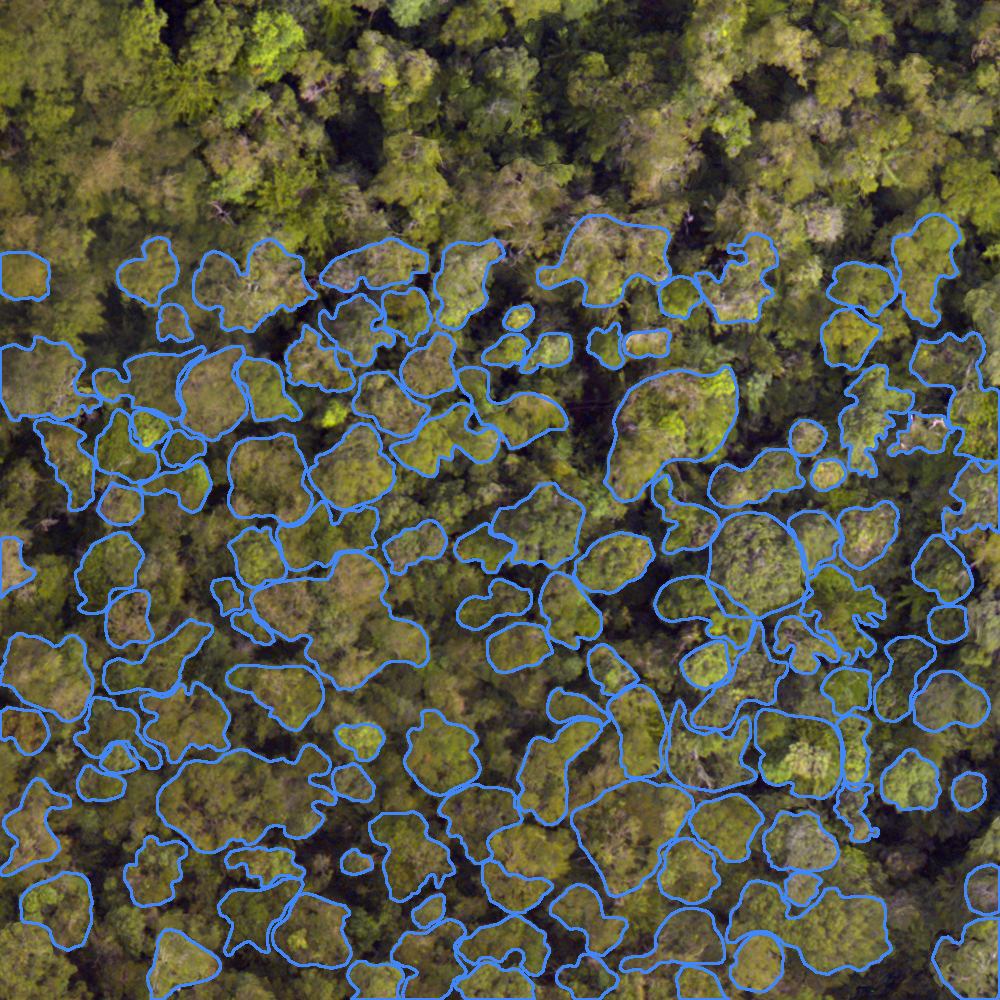
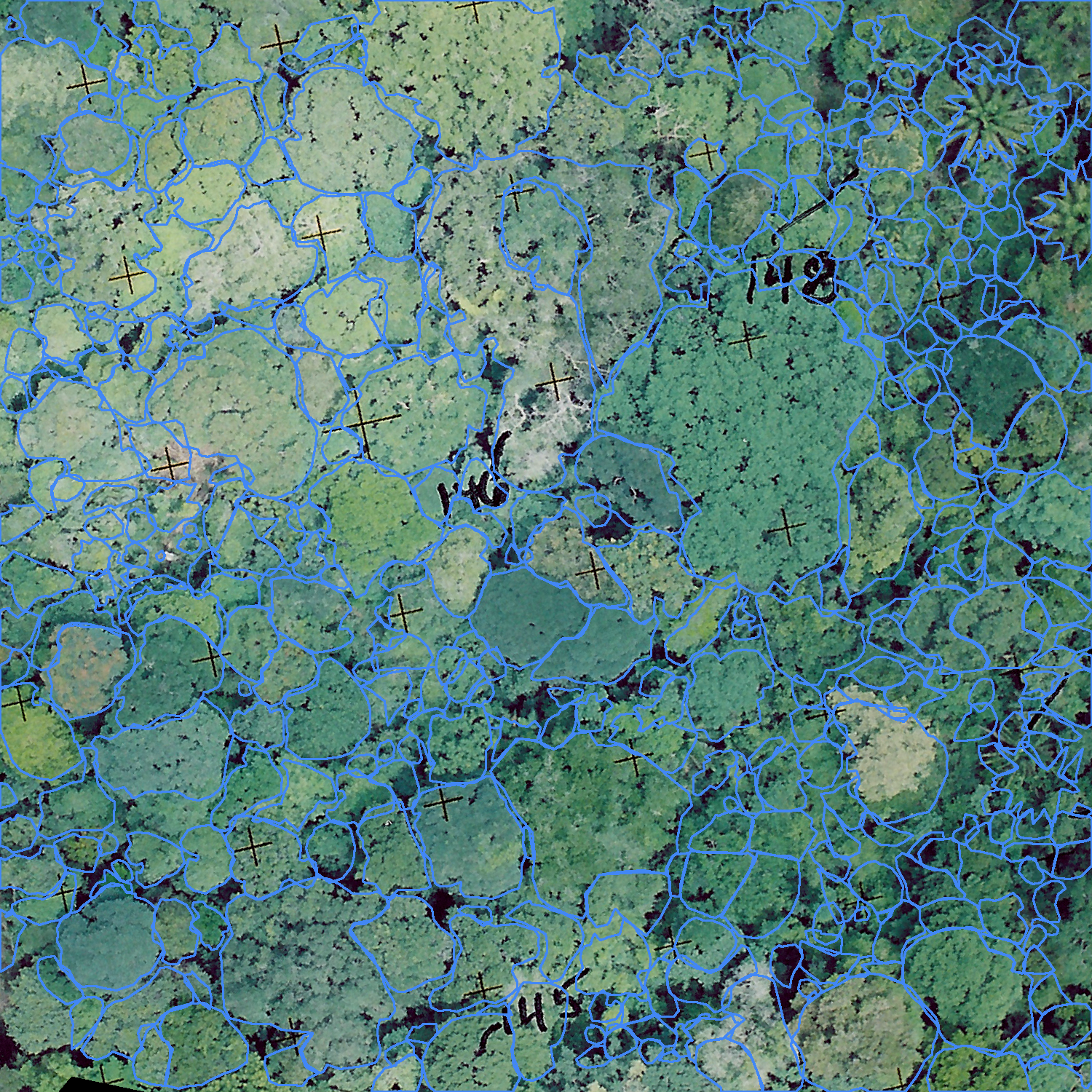
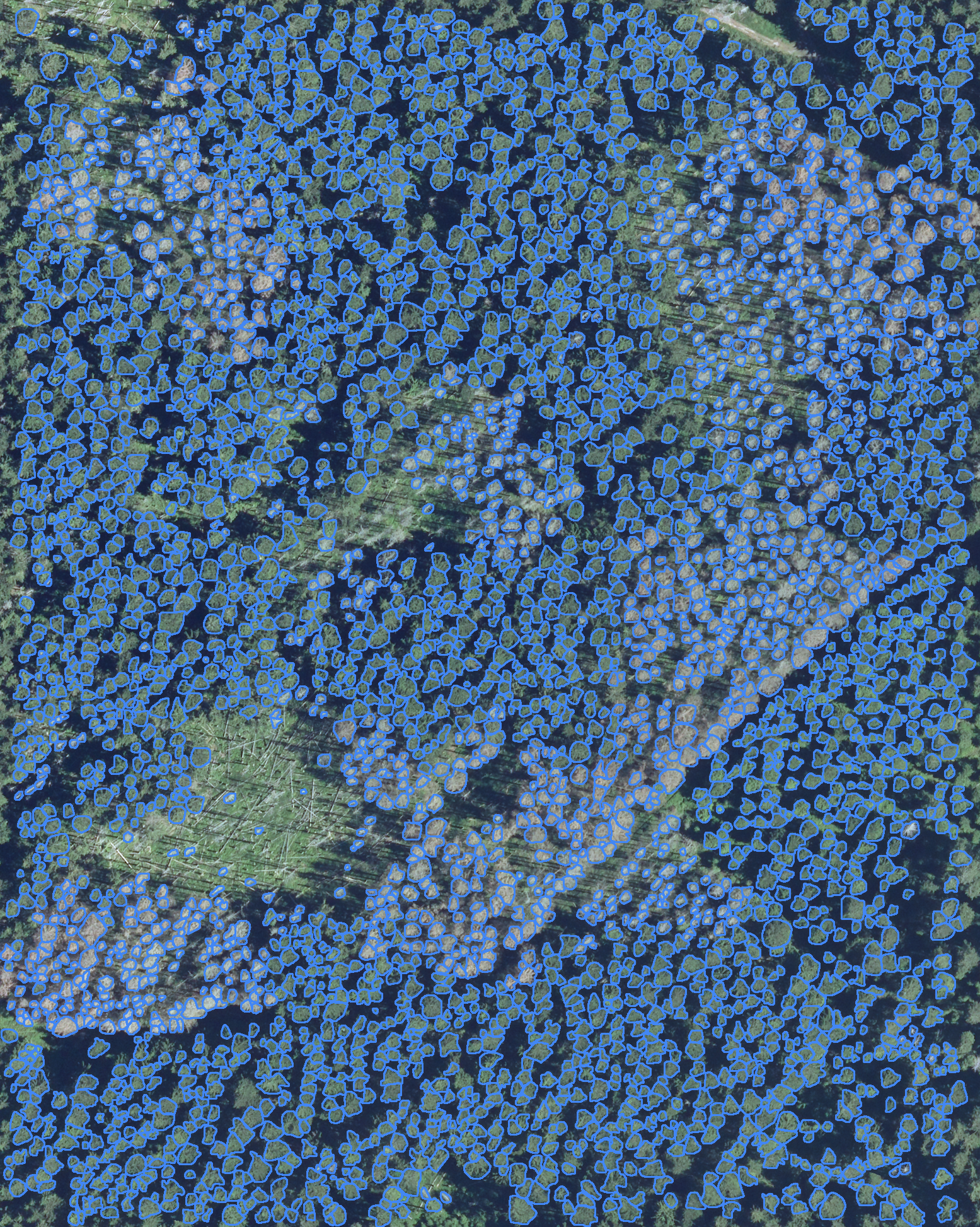
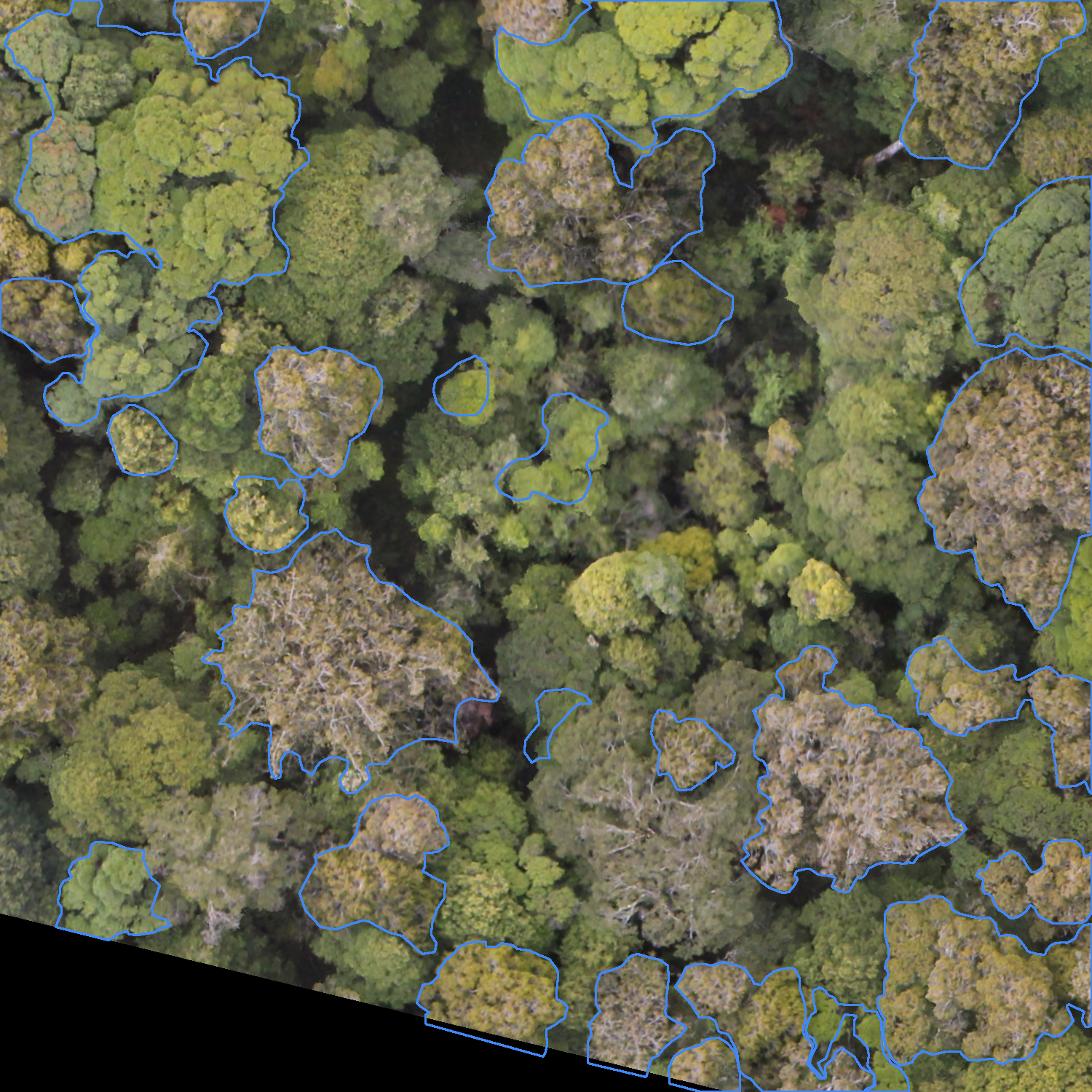
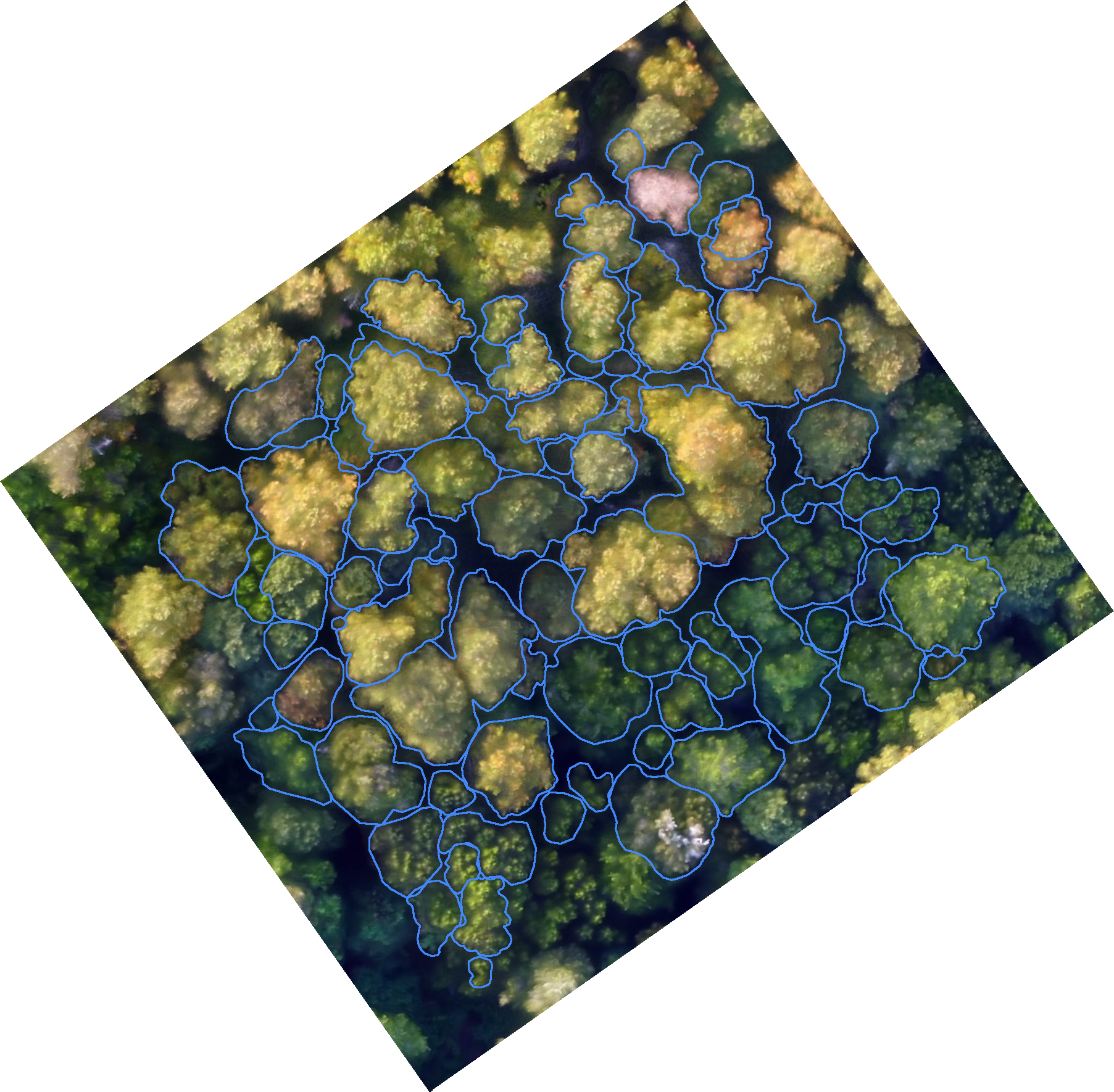
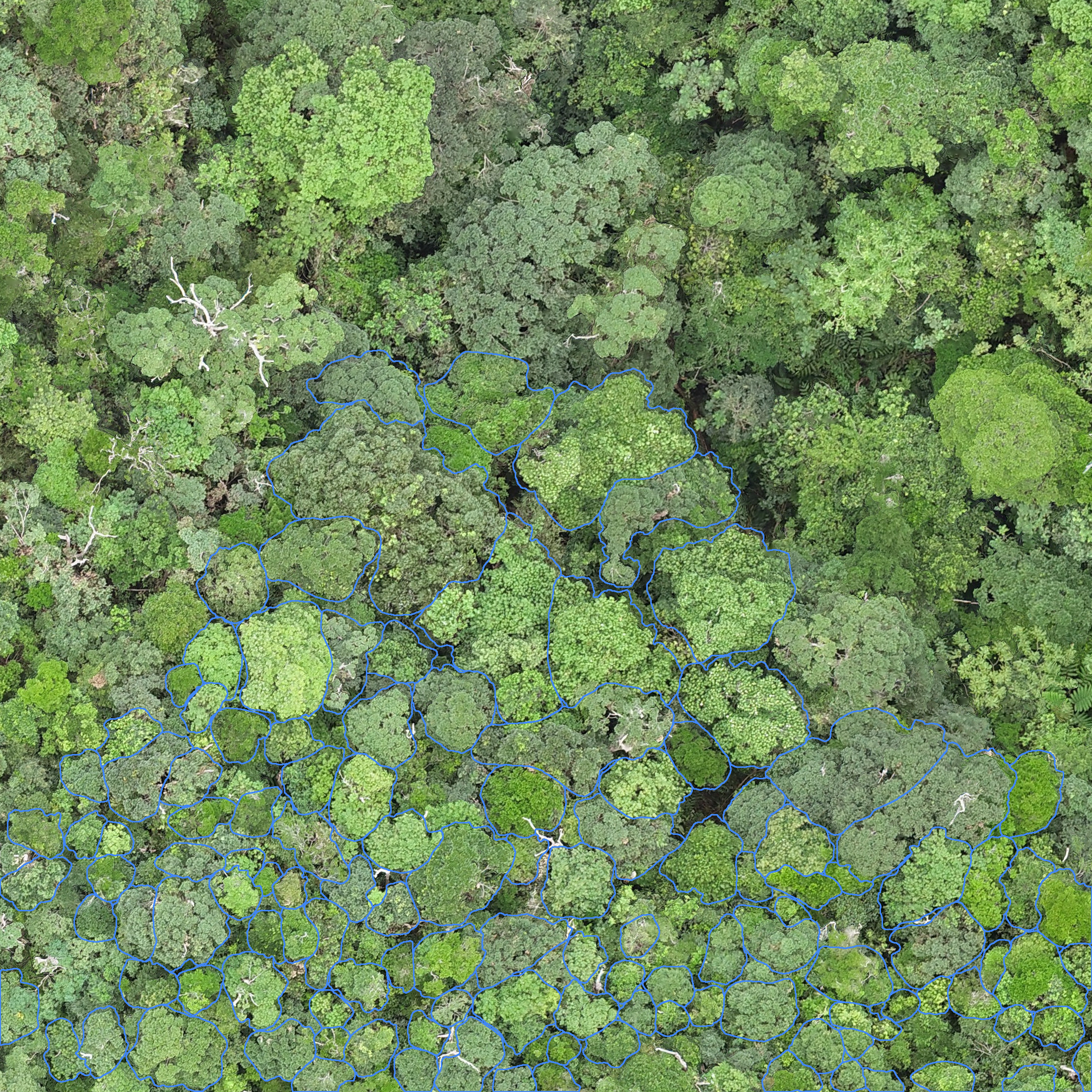
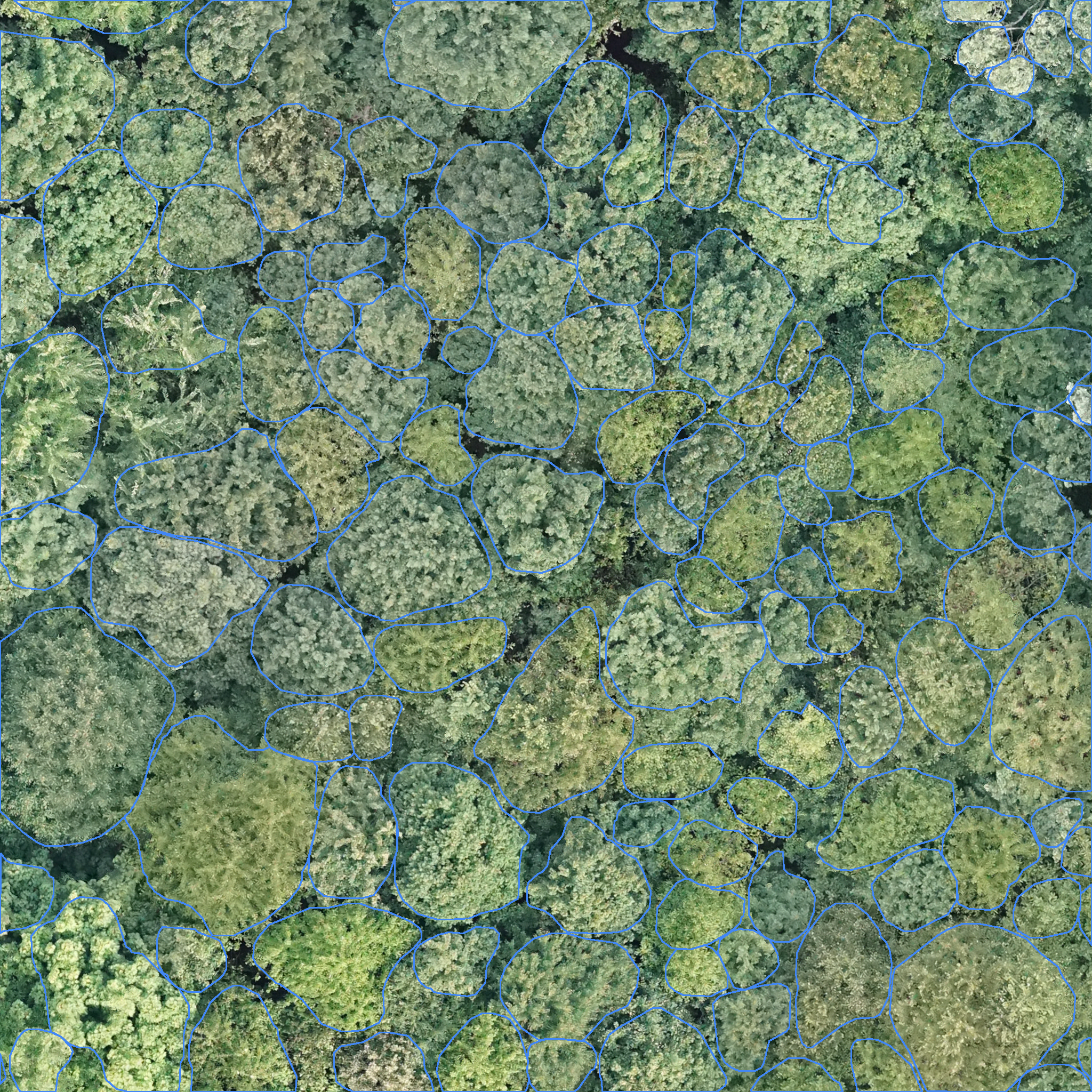
Polygons¶
Araujo et al. 2020¶

Link: https://journals.plos.org/plosone/article?id=10.1371/journal.pone.0243079
Location: Manuas, Brazil
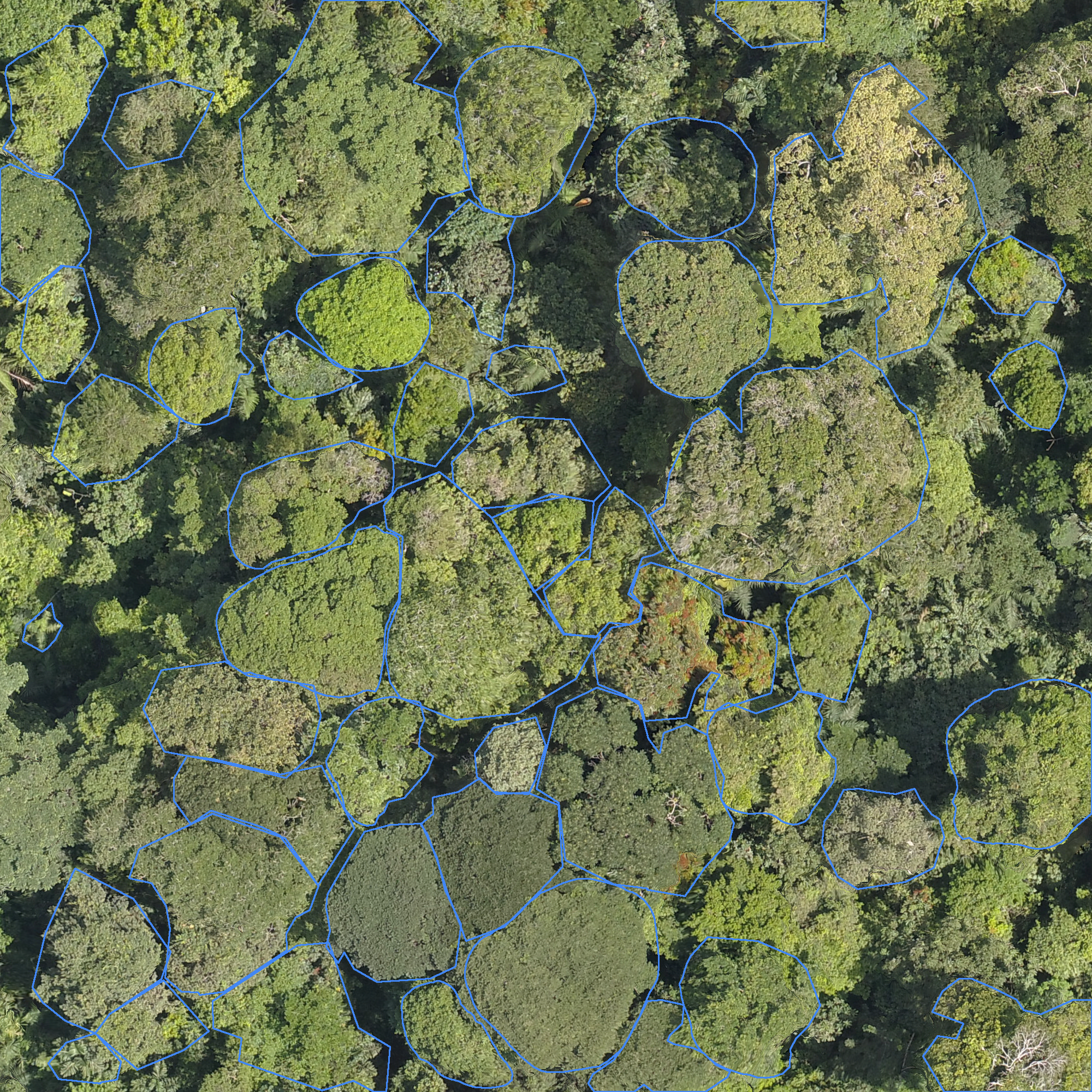
Ball et al. 2023¶
Link: https://zenodo.org/records/8136161
Location: Danum, Malaysia
Bohlman 2008¶
Unpublished data from Barro Colorado Island, field verified after photo-interpretation.
Both crowns and points are available.
Location: BCI, Panama
Cloutier et al. 2023¶
Source Name: “Cloutier et al. 2023”¶
Link: https://zenodo.org/records/8148479
Location: Quebec, Canada
Feng et al. 2025¶
Source Name: ‘Feng et al. 2025’¶
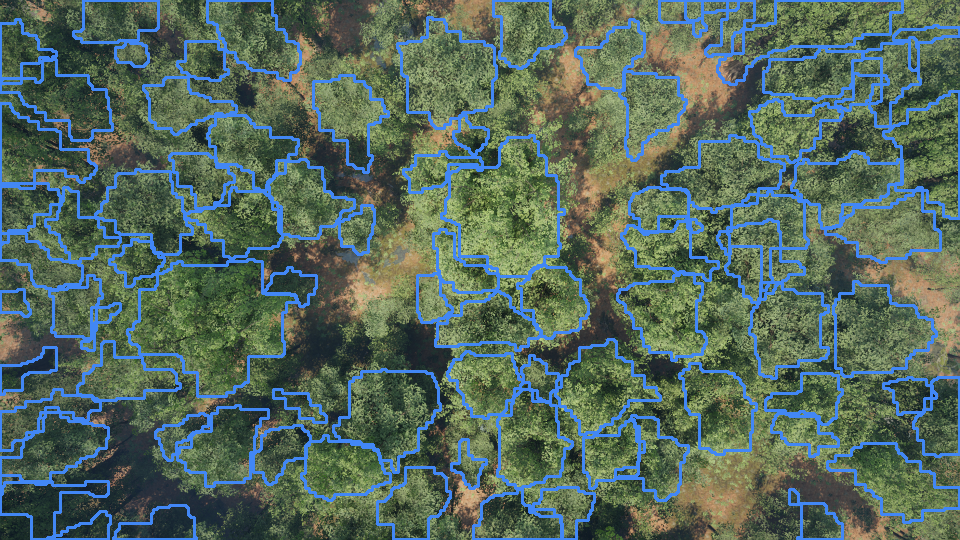
Citation: Feng, Zhengpeng, Yihang She, and Srinivasan Keshav. “SPREAD: A large-scale, high-fidelity synthetic dataset for multiple forest vision tasks.” Ecological Informatics 87 (2025): 103085.
Link: Zenodo
Location: Simulation
Note this dataset is simulated and therefore somewhat more controvertial in its inclusion. We believe the size, diversity and realism of the images merit inclusion.
Firoze et al. 2023¶
Source Name: “Firoze et al. 2023”¶
Location: Indiana, United States
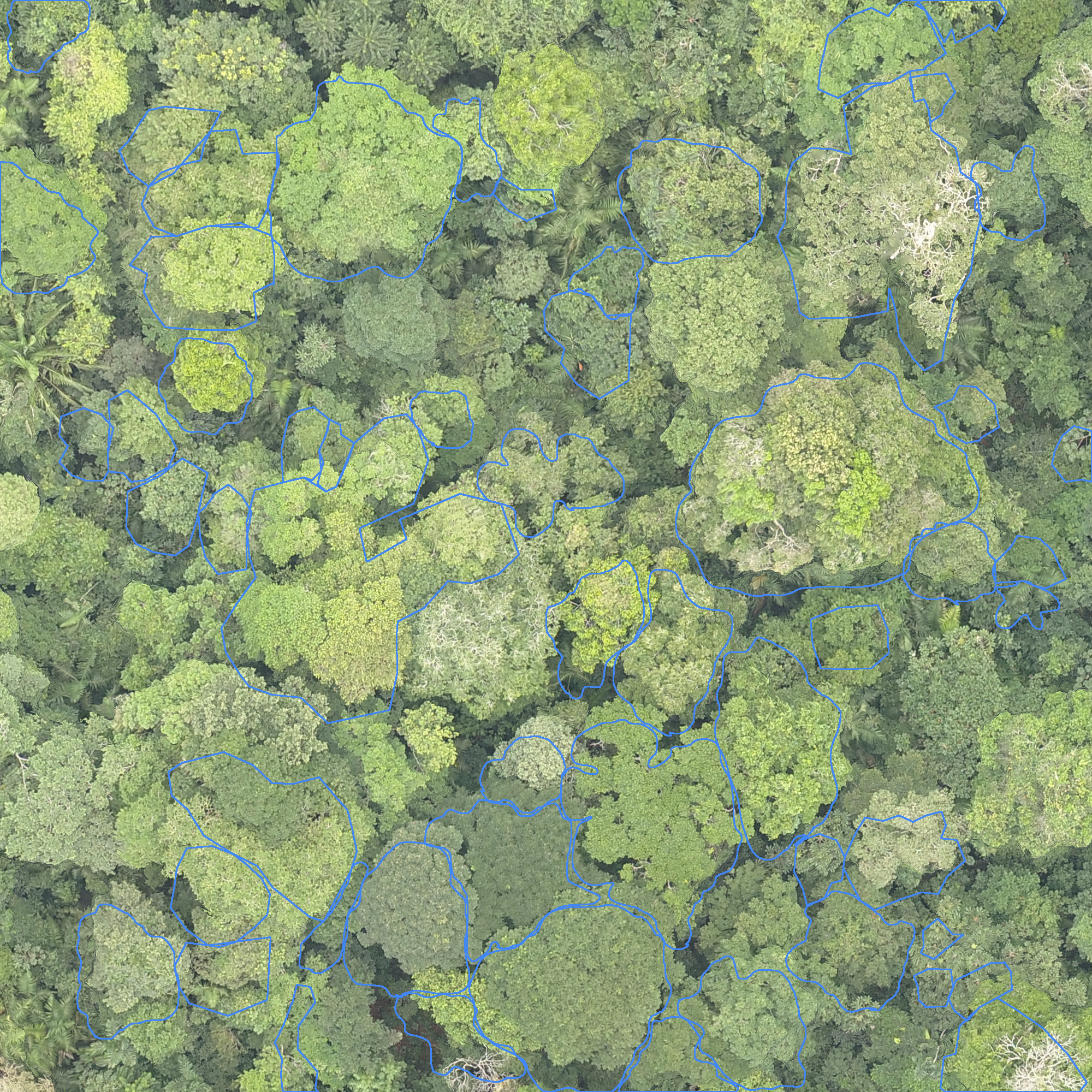
Hickman et al. 2021¶
Link: https://zenodo.org/records/5515408
Location: Sabah, Malaysia
Jansen et al. 2023¶

Link: https://zenodo.org/records/7094916
Location: Northern Australia
JustDiggit¶
Source Name: “Justdiggit 2023”¶
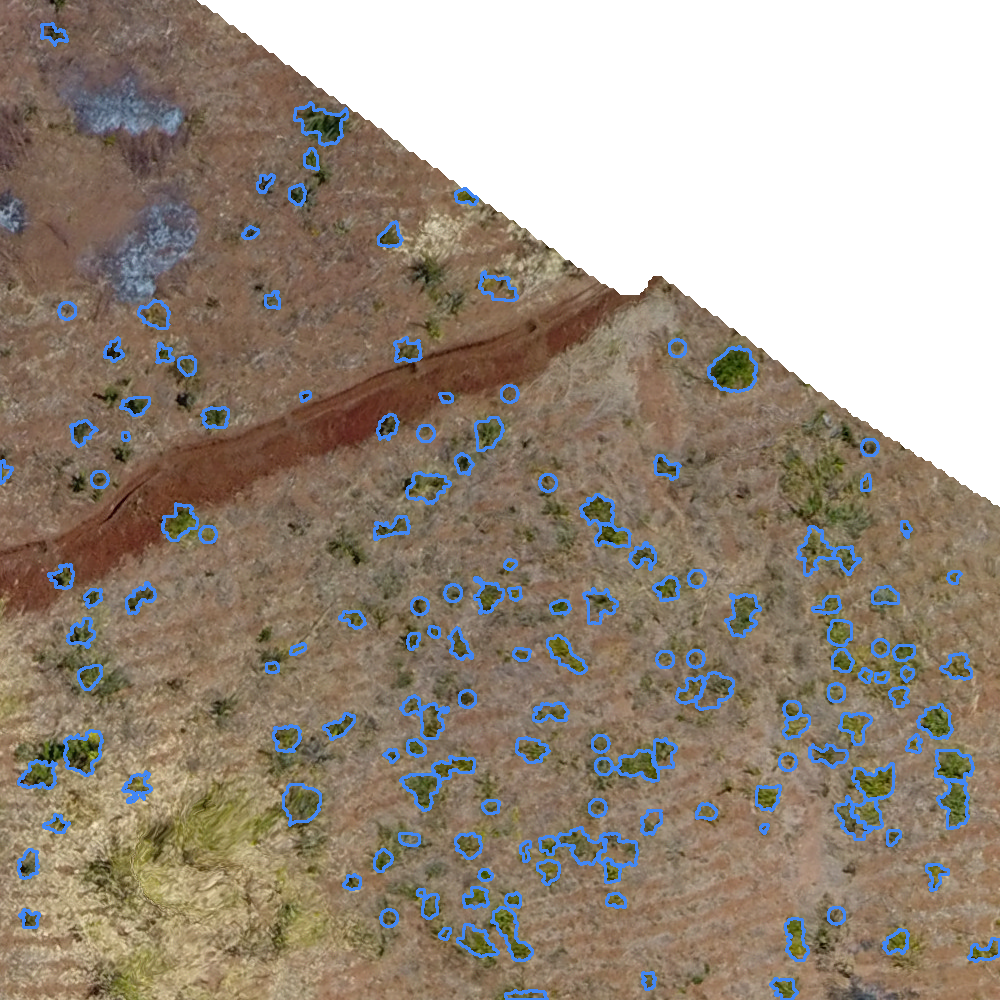
Link: JustDigIt
Location: Tanzania
Citation status uncertain, contact Tjomme Dooper fruit punch AI.
Li et al. 2023¶

link Manuscript github
Location: Denmark
Lefebvre et al. 2024¶
Source Name: “Lefebvre et al. 2024”¶
Lucas et al. 2024¶
Source Name: “Lucas et al. 2024”¶
Link: Manuscript
Citation Lucas, Moritz, et al. “Individual tree detection and crown delineation in the Harz National Park from 2009 to 2022 using mask R–CNN and aerial imagery.” ISPRS Open Journal of Photogrammetry and Remote Sensing 13 (2024): 100071.
Kattenborn et al. 2023¶
Link: https://zslpublications.onlinelibrary.wiley.com/doi/full/10.1002/rse2.146
Location: New Zealand
Miranda et al. 2024¶
Safonova et al. 2021¶

Link: https://www.mdpi.com/1424-8220/21/5/1617
Location: Spain
Takeshige et al. 2025¶
Source Name: “Takeshige et al. 2025”¶
Link: https://esj-journals.onlinelibrary.wiley.com/doi/10.1111/1440-1703.12555
Location: Japan
Troles et al. 2024¶
Source Name: “Troles et al. 2024”¶
Citation: Troles, J.; Schmid, U.; Fan, W.; Tian, J. BAMFORESTS: Bamberg Benchmark Forest Dataset of Individual Tree Crowns in Very-High-Resolution UAV Images. Remote Sens. 2024, 16, 1935. https://doi.org/10.3390/rs16111935
Link: https://www.mdpi.com/2072-4292/16/11/1935
Location: Bamberg, Germany
Wagner et al. 2023¶
Link: https://www.mdpi.com/2504-446X/7/3/155
https://www.mdpi.com/2072-4292/16/11/1935
Location: Australia
Vasquez et al. 2023¶
Link: Figshare
Location: Barro Colorado Island, Panama
There is also a training-only portion of this that was used in conjuction with a model to predict labels that were then verified.
Allen et al. 2025¶
Source Name: “Allen et al. 2025”¶
Citation: Allen, M.J., Owen, H.J.F., Grieve, S.W.D., & Lines, E.R. Manual Labelling Artificially Inflates Deep Learning-Based Segmentation Performance on RGB Images of Closed Canopy: Validation Using TLS. Remote Sensing of Environment (in press). https://arxiv.org/pdf/2503.14273
Location: Joensuu, Finland (boreal) and Alto Tajo, Spain (Mediterranean)
Crown polygons delineated from co-located terrestrial LiDAR (TLS) following the pipeline in Allen et al. (2025). Orthomosaics are tiled for MillionTrees packaging. This source is validation-only: use after training and standard test evaluation for independent TLS ground-truth assessment. Do not use for hyperparameter tuning.
Khan et al. 2026¶
Source Name: “Khan et al. 2026”¶
Link: https://zenodo.org/records/19695972
DOI: https://doi.org/10.5281/zenodo.19695972
Location: Halle (Saale), Germany
DeepTrees-Halle: per-tile polygon shapefiles over the city of Halle. Classes are 0 (tree), 1 (cluster of trees), and 2 (unsure); MillionTrees retains only individual trees (class 0).
NEON combined crowns¶
Source Name: “NEON combined crowns”¶
Location: Harvard Forest (NEON HARV site), Massachusetts, USA
Field-mapped crown polygons (combined from multiple campaigns at Harvard Forest) paired with NEON AOP high-resolution camera imagery (DP3.30010.001). The crown polygons are merged into a single GeoPackage, draped over the AOP mosaic, and tiled for MillionTrees.
NEON MultiTemporal¶
Source Name: “NEON MultiTemporal”¶

Location: Multiple NEON sites across the United States, multiple flight years
Per-plot bounding box, point, and polygon annotations over NEON AOP camera imagery ({site}_{plot}_{year}.tif) for multi-year evaluation. All rows are assigned existing_split="test" and are used only for evaluation across geometry types.
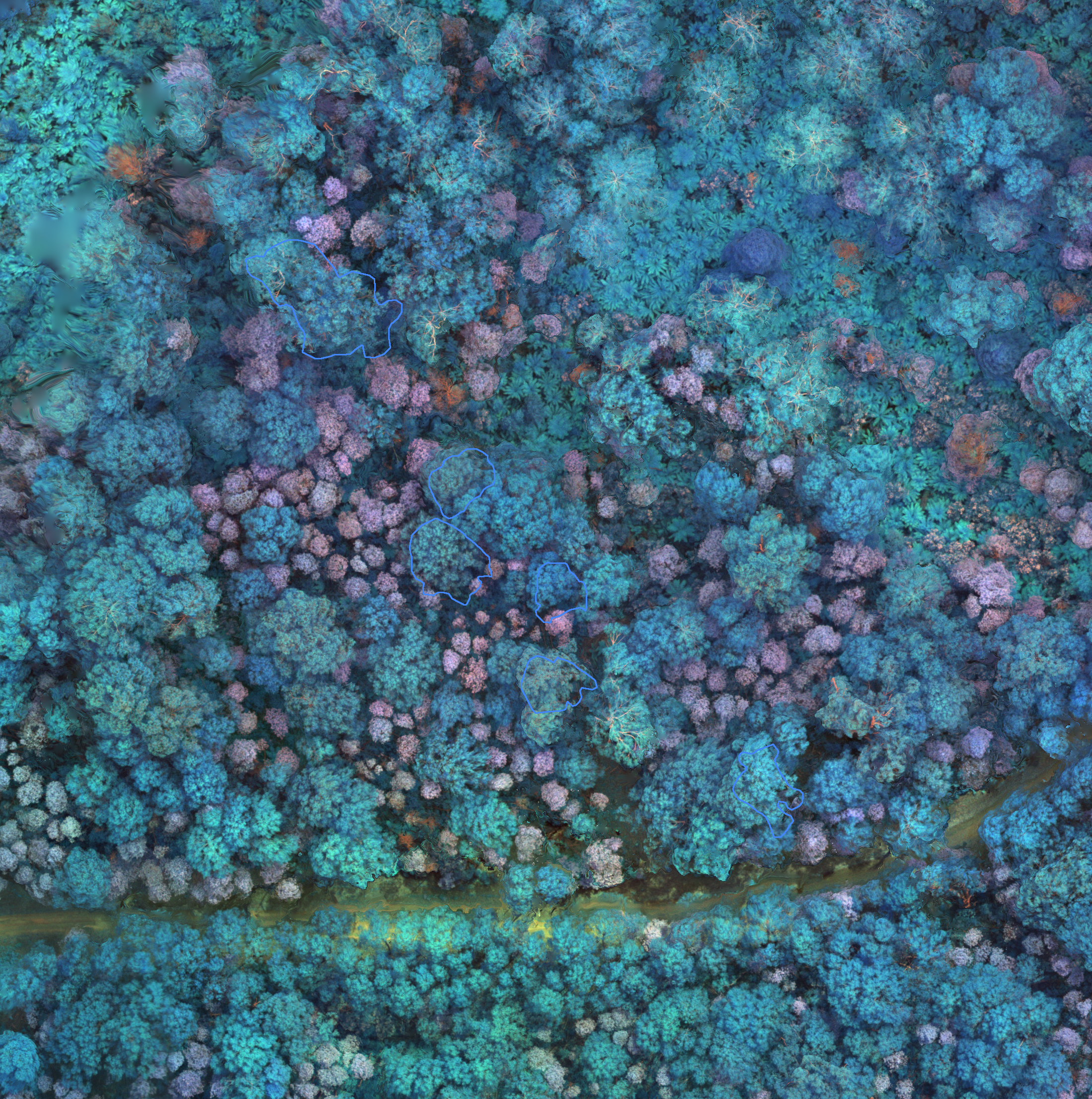
Schütte et al. 2025¶
Source Name: “Schütte et al. 2025”¶
Location: Berlin and Osnabrück, Germany
Urban tree crown polygons from the ITCD Urban Berlin/Osnabrück dataset, drawn over 20 cm DOP false-color orthoimagery and tiled for MillionTrees.
Zuniga-Gonzalez et al. 2023¶
Source Name: “Zuniga-Gonzalez et al. 2023”¶
Location: London / Cambridge, United Kingdom
UrbanLondon urban tree crown polygon dataset at 0.25 m GSD with an existing train/test split preserved in MillionTrees.
Unsupervised¶
Weinstein et al. 2018¶
Coregistered LIDAR and RGB were acquired over 27 sites in the National Ecological Observation Network, USA. These sites cover a range of forest habitats. A weakly supervised LiDAR tree detection algorithm was used to predict tree locations. These locatons were draped over the RGB data to create a very large weakly supervised dataset. There is currently over 40 million tree locations from the original dataset and more can be generated with ongoing data collection.
Citation: Weinstein, B.G.; Marconi, S.; Bohlman, S.; Zare, A.; White, E. Individual Tree-Crown Detection in RGB Imagery Using Semi-Supervised Deep Learning Neural Networks. Remote Sens. 2019, 11, 1309. https://doi.org/10.3390/rs11111309
Location: Forest across the United States (NEON)
Open Forest Observatory¶
High resolution drone imagery used to create photogrametry-derived predictions of tree crowns.
https://openforestobservatory.org/
https://besjournals.onlinelibrary.wiley.com/doi/10.1111/2041-210X.13860
Source Name: “Young et al. 2025 unsupervised”¶
Location Forest across the United States